

网络首发栏目展示本刊经同行评议确定正式录用的文章,这些文章目前处在编校过程,尚未确定卷期及页码,但可以根据DOI进行引用。
显示方式:
当前状态:
, 最新更新时间:
摘要:
为提高智能车节点定位准确率,研究了基于3D点云语义地图表征的智能车定位方法。该方法分为3个部分:基于三维激光点云的语义分割,包括地面分割,交通标志牌分割和杆状语义目标分割;面向智能车的点云语义地图表征,利用分割的语义目标投影,生成带权有向图,语义路,语义编码,再以语义编码和高精度GPS的全局位置组成语义地图表征模型;基于语义表征模型的智能车定位,包括基于GPS匹配的粗定位和基于语义编码渐进匹配的节点定位。实验在3种长度不同、复杂度不同的道路场景下进行,节点定位准确率分别为98.5%,97.6%和97.8%,结果表明所提出的定位方法节点定位准确率高、鲁棒性强且适用于不同的道路场景。
为提高智能车节点定位准确率,研究了基于3D点云语义地图表征的智能车定位方法。该方法分为3个部分:基于三维激光点云的语义分割,包括地面分割,交通标志牌分割和杆状语义目标分割;面向智能车的点云语义地图表征,利用分割的语义目标投影,生成带权有向图,语义路,语义编码,再以语义编码和高精度GPS的全局位置组成语义地图表征模型;基于语义表征模型的智能车定位,包括基于GPS匹配的粗定位和基于语义编码渐进匹配的节点定位。实验在3种长度不同、复杂度不同的道路场景下进行,节点定位准确率分别为98.5%,97.6%和97.8%,结果表明所提出的定位方法节点定位准确率高、鲁棒性强且适用于不同的道路场景。
当前状态:
, 最新更新时间:
摘要:
为准确发现邮轮内部空间乘客之间的伴随关系,在室内环境安装UWB定位设备开展室内人员定位实验。根据UWB定位的位置数据特点,提出结合室内位置语义的Hausdorff-DBSCAN算法以聚类邮轮乘员轨迹,并利用LSTM神经网络对疑似伴随关系对象进行相似度变化趋势的预测。传统的Hausdorff算法在计算轨迹相似度时未考虑轨迹时序一致的问题,引入位置语义序列能够较好地解决这一问题。改进后的Hausdorff-DBSCAN算法的输入为乘员轨迹数据集,根据轨迹整体相似度阈值选定聚类半径,输出具有伴随关系的乘员轨迹聚类结果; LSTM神经网络以定长时间窗口的点邻近度序列为输入,预测后一时刻点邻近度值,结合轨迹相似度阈值和预测结果分析乘员伴随关系的时序变化。利用Anylogic建模单层邮轮室内环境进行乘员仿真得到的轨迹数据验证算法的有效性。改进的Hausdorff-DBSCAN算法的准确率为0.920,召回率为0.950,F1值为0.934,准确率高出对比算法至少5.7%,召回率高出对比算法至少8.0%,F1值高出对比算法至少6.7%。同时LSTM在预测邮轮乘员之间相似度变化时,收敛后的误差值能保持在3%~4%左右,预测结果具有较高的准确性。
为准确发现邮轮内部空间乘客之间的伴随关系,在室内环境安装UWB定位设备开展室内人员定位实验。根据UWB定位的位置数据特点,提出结合室内位置语义的Hausdorff-DBSCAN算法以聚类邮轮乘员轨迹,并利用LSTM神经网络对疑似伴随关系对象进行相似度变化趋势的预测。传统的Hausdorff算法在计算轨迹相似度时未考虑轨迹时序一致的问题,引入位置语义序列能够较好地解决这一问题。改进后的Hausdorff-DBSCAN算法的输入为乘员轨迹数据集,根据轨迹整体相似度阈值选定聚类半径,输出具有伴随关系的乘员轨迹聚类结果; LSTM神经网络以定长时间窗口的点邻近度序列为输入,预测后一时刻点邻近度值,结合轨迹相似度阈值和预测结果分析乘员伴随关系的时序变化。利用Anylogic建模单层邮轮室内环境进行乘员仿真得到的轨迹数据验证算法的有效性。改进的Hausdorff-DBSCAN算法的准确率为0.920,召回率为0.950,F1值为0.934,准确率高出对比算法至少5.7%,召回率高出对比算法至少8.0%,F1值高出对比算法至少6.7%。同时LSTM在预测邮轮乘员之间相似度变化时,收敛后的误差值能保持在3%~4%左右,预测结果具有较高的准确性。
当前状态:
, 最新更新时间:
摘要:
针对采用多状态约束卡尔曼滤波(MSCKF)的视觉惯性里程计定位精度易受特征点匹配异常值影响问题,提出了一种基于描述符辅助光流跟踪匹配的数据关联方法。该方法采用金字塔LK光流对序列图像中特征点进行跟踪匹配,计算每一对匹配点的rBRIEF描述符,根据Hamming距离对描述符的相似度进行判断消除异常匹配点。在实验中从特征点匹配主观效果以及定位精度两个方面评估本文方法的有效性。结果表明:所提出方法能够有效滤除动态场景下图像特征匹配的异常值,使用该方法处理后的图像进行MSCKF运动解算,位置结果漂移率小于0.38%,相较于未剔除异常匹配值的MSCKF算法结果,改善了54.7%,单帧图像处理时间约为39 ms。
针对采用多状态约束卡尔曼滤波(MSCKF)的视觉惯性里程计定位精度易受特征点匹配异常值影响问题,提出了一种基于描述符辅助光流跟踪匹配的数据关联方法。该方法采用金字塔LK光流对序列图像中特征点进行跟踪匹配,计算每一对匹配点的rBRIEF描述符,根据Hamming距离对描述符的相似度进行判断消除异常匹配点。在实验中从特征点匹配主观效果以及定位精度两个方面评估本文方法的有效性。结果表明:所提出方法能够有效滤除动态场景下图像特征匹配的异常值,使用该方法处理后的图像进行MSCKF运动解算,位置结果漂移率小于0.38%,相较于未剔除异常匹配值的MSCKF算法结果,改善了54.7%,单帧图像处理时间约为39 ms。
当前状态:
, 最新更新时间:
摘要:
为解决室内交通场景中智能汽车和移动机器人进行定位计算的问题,利用室内场景中已存在的各类标志,引入BEBLID(Boosted Efficient Binary Local Image Descriptor)算法,提出1种视觉定位方法。对BEBLID算法进行改进,赋予其对图像整体进行特征表征的能力。将定位过程分解为离线阶段和在线阶段,离线阶段构建场景标志地图,在线阶段将当前图像所提取的全局和局部BEBLID特征与场景标志地图的对应特征进行匹配,引入KNN方法确定最近节点和最近图像,并利用场景特征地图中存储的标志坐标信息,进行度量计算,获取当前位置信息。在教学楼、办公楼和室内停车场场景进行实验,实验中对场景标志的正确识别率达到90%,平均定位误差小于1 m,与传统方法相比,同一样本下识别精度相对提升约10%,实验验证了算法的有效性。
为解决室内交通场景中智能汽车和移动机器人进行定位计算的问题,利用室内场景中已存在的各类标志,引入BEBLID(Boosted Efficient Binary Local Image Descriptor)算法,提出1种视觉定位方法。对BEBLID算法进行改进,赋予其对图像整体进行特征表征的能力。将定位过程分解为离线阶段和在线阶段,离线阶段构建场景标志地图,在线阶段将当前图像所提取的全局和局部BEBLID特征与场景标志地图的对应特征进行匹配,引入KNN方法确定最近节点和最近图像,并利用场景特征地图中存储的标志坐标信息,进行度量计算,获取当前位置信息。在教学楼、办公楼和室内停车场场景进行实验,实验中对场景标志的正确识别率达到90%,平均定位误差小于1 m,与传统方法相比,同一样本下识别精度相对提升约10%,实验验证了算法的有效性。
当前状态:
, 最新更新时间:
摘要:
为实现智能网联环境下低成本、高精度的车辆定位,研究了基于自适应遗传Rao-Blackwellized粒子滤波的协同地图匹配算法。利用联网车辆的定位信息和道路约束条件消除公共偏差,提高车辆定位精度。将自适应遗传算法引入到粒子滤波的重采样过程中,增加粒子的多样性,解决传统粒子滤波算法中容易出现的“粒子退化”和“粒子耗尽”问题。通过仿真实验与传统粒子滤波及卡尔曼平滑粒子滤波下的定位结果进行了对比,同时分析了不同联网车辆数目对定位精度的影响。通过实际测试验证了算法在实际应用中的定位效果。实测结果表明:以典型十字路口为例,在联网车辆数目为4的情况下,协同地图匹配算法的定位误差范围为1.67 m,分别为原始GNSS定位以及单车地图匹配定位结果的41.03%和56.80%。同时,该算法的统计定位精度(CEP)达到1.06 m,比GNSS原始定位精度提高了2.52 m,具有较好的定位效果。
为实现智能网联环境下低成本、高精度的车辆定位,研究了基于自适应遗传Rao-Blackwellized粒子滤波的协同地图匹配算法。利用联网车辆的定位信息和道路约束条件消除公共偏差,提高车辆定位精度。将自适应遗传算法引入到粒子滤波的重采样过程中,增加粒子的多样性,解决传统粒子滤波算法中容易出现的“粒子退化”和“粒子耗尽”问题。通过仿真实验与传统粒子滤波及卡尔曼平滑粒子滤波下的定位结果进行了对比,同时分析了不同联网车辆数目对定位精度的影响。通过实际测试验证了算法在实际应用中的定位效果。实测结果表明:以典型十字路口为例,在联网车辆数目为4的情况下,协同地图匹配算法的定位误差范围为1.67 m,分别为原始GNSS定位以及单车地图匹配定位结果的41.03%和56.80%。同时,该算法的统计定位精度(CEP)达到1.06 m,比GNSS原始定位精度提高了2.52 m,具有较好的定位效果。
2024, 42(3): 1-10.
doi: 10.3963/j.jssn.1674-4861.2024.03.001
摘要:
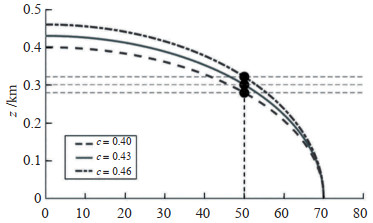
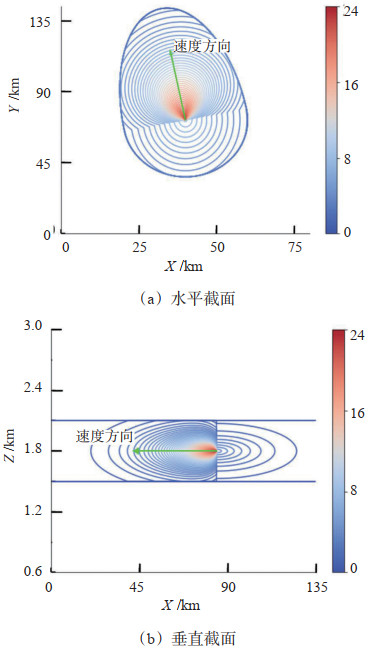
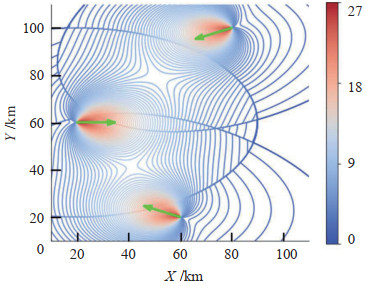
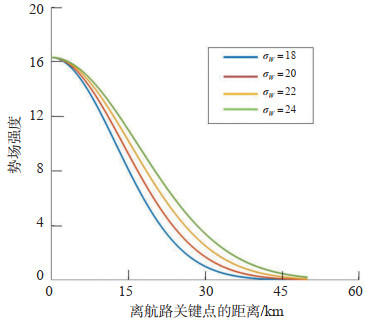
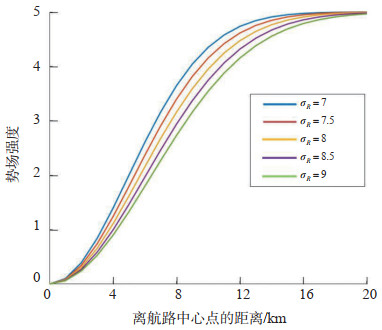
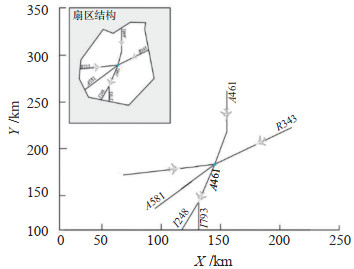
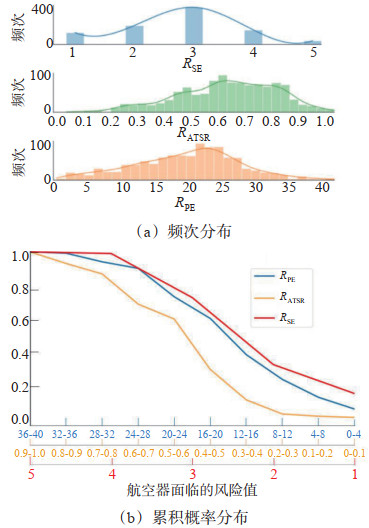
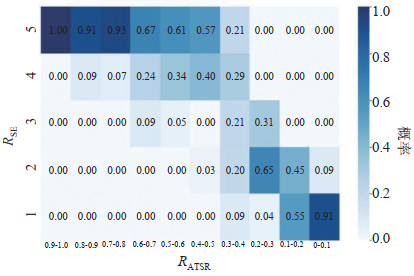
为评估复杂交通场景下的多航空器的交互风险,由空中交通风险与势场理论的相似性,创新性地提出了“多航空器与空域环境的交互势场”概念。构造以航空器、空域点关键及航路为势场源的交互势场,并分别提出了航空器、空域关键点及航路交互势场的生成函数模型;构造随时间变化的历史航迹势场模型,提出考虑历史航迹的短期影响效应的交互势场修正方法;考虑航空器在水平与垂直维度的多场景安全间隔标准,求解满足安全间隔标准的交互势场生成函数参数;考虑多势场源的交互特征,提出了航空器、空域关键点及航路交互势场的融合机制。借鉴势场力与势能的转化关系,提出了基于势能的航空器交互风险指标RPE,从能量的角度,揭示了多航空器交互以及航空器与空域环境交互的风险变化过程。为验证评估方法的有效性,以国内某真实扇区为场景开展仿真实验,结果表明:①与其他风险表征指标相比,所提的交互风险指标RPE更接近于空中交通管制员感知到的风险指数;②在某些区间,RPE表现的更为灵敏,平均绝对误差为0.077,明显低于传统基于冲突时间的风险指数RATSR。综上,本文所提出的交互风险评估方法有望为未来空中复杂交通场景的风险管理提供更加精确的决策支撑。
为评估复杂交通场景下的多航空器的交互风险,由空中交通风险与势场理论的相似性,创新性地提出了“多航空器与空域环境的交互势场”概念。构造以航空器、空域点关键及航路为势场源的交互势场,并分别提出了航空器、空域关键点及航路交互势场的生成函数模型;构造随时间变化的历史航迹势场模型,提出考虑历史航迹的短期影响效应的交互势场修正方法;考虑航空器在水平与垂直维度的多场景安全间隔标准,求解满足安全间隔标准的交互势场生成函数参数;考虑多势场源的交互特征,提出了航空器、空域关键点及航路交互势场的融合机制。借鉴势场力与势能的转化关系,提出了基于势能的航空器交互风险指标RPE,从能量的角度,揭示了多航空器交互以及航空器与空域环境交互的风险变化过程。为验证评估方法的有效性,以国内某真实扇区为场景开展仿真实验,结果表明:①与其他风险表征指标相比,所提的交互风险指标RPE更接近于空中交通管制员感知到的风险指数;②在某些区间,RPE表现的更为灵敏,平均绝对误差为0.077,明显低于传统基于冲突时间的风险指数RATSR。综上,本文所提出的交互风险评估方法有望为未来空中复杂交通场景的风险管理提供更加精确的决策支撑。









2024, 42(3): 11-19.
doi: 10.3963/j.jssn.1674-4861.2024.03.002
摘要:
自动驾驶汽车正向现有交通运行环境中逐步渗透,形成了与人工驾驶汽车混合运行的人机混驾交通流。有研究表明:自动驾驶汽车的百公里事故率为9.1,高出人工驾驶汽车(4.1)的1倍多;另外,人机纵向交互造成的追尾事故形态占所有事故形态的57.5%,远超过人类驾驶的27.9%,因此亟需研究人机纵向交互安全影响机理。现有研究通常采用驾驶模拟实验,分析虚拟仿真环境下人工驾驶汽车驾驶人与自动驾驶汽车的纵向交互行为与安全性,但模拟环境与实际道路场景差异较大,难以准确反映人机混驾交通流中的真实车辆交互行为。通过自动驾驶汽车开放道路测试数据,获取真实混驾条件下的车辆纵向交互场景,对车辆类型、行驶环境等影响因素与纵向交互行为及安全的影响机理开展研究。具体针对筛选后的人工驾驶汽车驾驶人分别跟驰人工驾驶汽车和跟驰自动驾驶汽车的场景数据,利用结构方程模型,构建了前车驾驶行为、前车车辆类型、路段运行速度水平与交互安全替代指标之间的链式作用关系。模型结果表明:前车车辆类型是否为自动驾驶汽车是影响纵向交互安全的显著影响因素之一,其他变量保持不变时,人工驾驶汽车驾驶人与自动驾驶前车的交互安全性相较于人类驾驶前车降低。
自动驾驶汽车正向现有交通运行环境中逐步渗透,形成了与人工驾驶汽车混合运行的人机混驾交通流。有研究表明:自动驾驶汽车的百公里事故率为9.1,高出人工驾驶汽车(4.1)的1倍多;另外,人机纵向交互造成的追尾事故形态占所有事故形态的57.5%,远超过人类驾驶的27.9%,因此亟需研究人机纵向交互安全影响机理。现有研究通常采用驾驶模拟实验,分析虚拟仿真环境下人工驾驶汽车驾驶人与自动驾驶汽车的纵向交互行为与安全性,但模拟环境与实际道路场景差异较大,难以准确反映人机混驾交通流中的真实车辆交互行为。通过自动驾驶汽车开放道路测试数据,获取真实混驾条件下的车辆纵向交互场景,对车辆类型、行驶环境等影响因素与纵向交互行为及安全的影响机理开展研究。具体针对筛选后的人工驾驶汽车驾驶人分别跟驰人工驾驶汽车和跟驰自动驾驶汽车的场景数据,利用结构方程模型,构建了前车驾驶行为、前车车辆类型、路段运行速度水平与交互安全替代指标之间的链式作用关系。模型结果表明:前车车辆类型是否为自动驾驶汽车是影响纵向交互安全的显著影响因素之一,其他变量保持不变时,人工驾驶汽车驾驶人与自动驾驶前车的交互安全性相较于人类驾驶前车降低。



2024, 42(3): 20-30.
doi: 10.3963/j.jssn.1674-4861.2024.03.003
摘要:
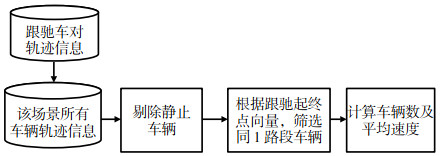
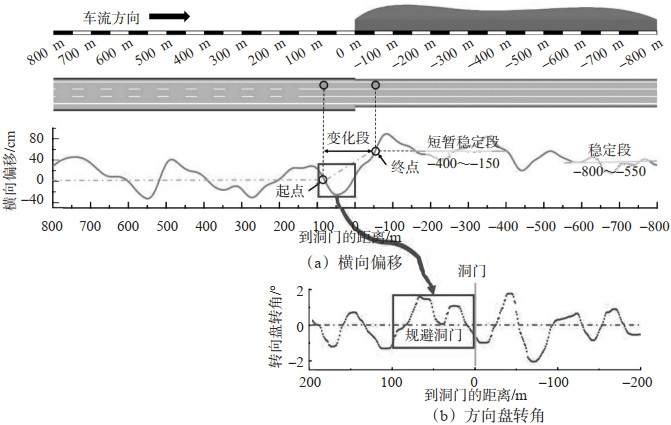
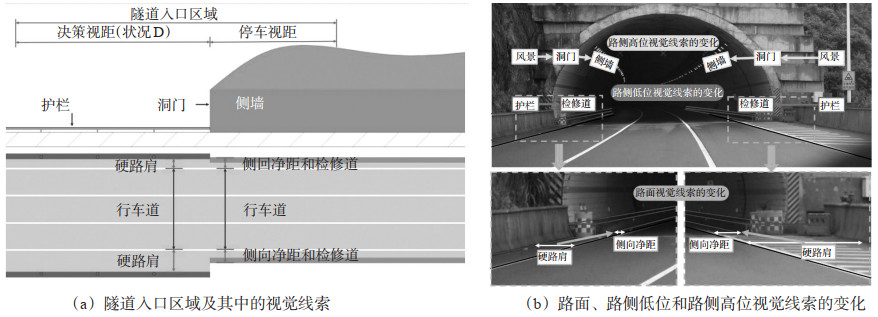
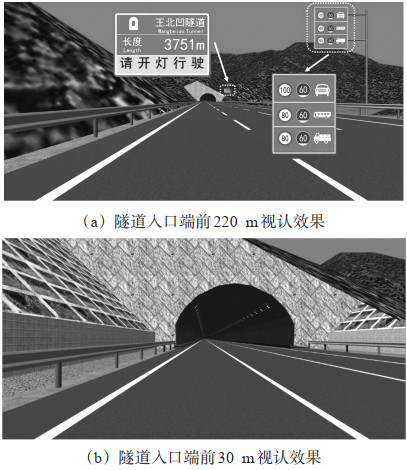
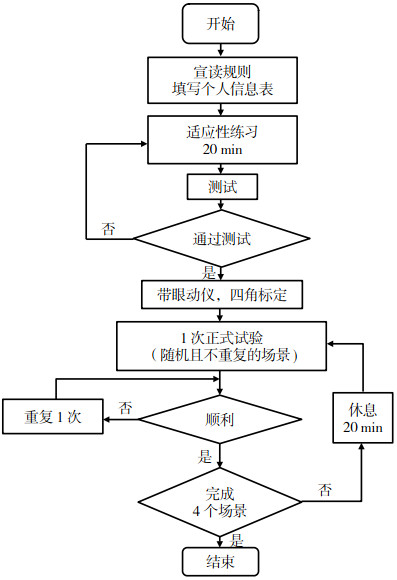
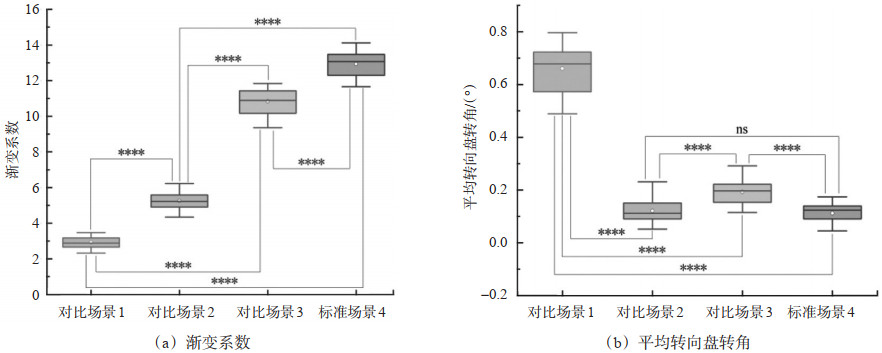
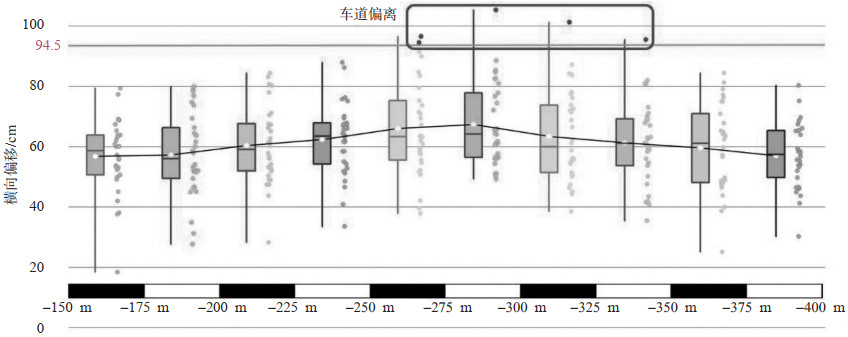
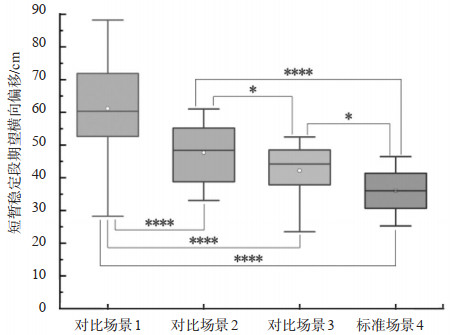
行车轨迹在高速公路隧道入口区域会发生突变。为分析这个现象产生的原因,并定量评价不同视线诱导方案的调节作用,构建了4个仿真场景。场景1为对照组,参照JTG D70/2—2014《公路隧道设计规范第二册交通工程与附属设施》设置,其他场景在场景1的基础上增设视线诱导方案。具体而言:场景2增设低位方案(弹性交通柱+防撞桶);场景3增设高位方案(反光环+警示型线形诱导标);场景4增设组合式方案(低位+高位)。通过模拟驾驶平台获得行驶距离、方向盘角度、横向偏移等数据,并根据轨迹突变现象的发生、演变和消退,构建评价指标体系。研究结果表明:视觉参照系突变会导致行车轨迹突变,连续一致的视线诱导方案可以调节这一现象。具体而言,与对照组相比,低位方案的突出效果是使洞门前的方向盘转角(SWAav)减少了82%,有助于减缓驾驶人对洞门的规避动作;高位方案的突出效果是使渐变系数(G)提高了3.7倍,短暂稳定段的期望横向偏移(O1)减少了31%,以及O1与稳定段期望横向偏移(O2)的差值(O1-O2)减少了75%,从而提高了轨迹的渐变性,减弱了对隧道侧壁的规避,并提升了对隧道内环境的适应性;组合式方案结合了低位和高位方案的优点,使G提高了4.4倍,SWAav减少了83%,O1减少了41%,O1-O2减少了98%,在提高轨迹变化段的渐变性,减弱对洞门的规避动作、对隧道侧壁的规避效应以及提高对隧道内环境适应性方面均表现最佳。因此,建议在高速公路隧道入口区域增设组合式方案,特殊情况可仅增设高位方案。
行车轨迹在高速公路隧道入口区域会发生突变。为分析这个现象产生的原因,并定量评价不同视线诱导方案的调节作用,构建了4个仿真场景。场景1为对照组,参照JTG D70/2—2014《公路隧道设计规范第二册交通工程与附属设施》设置,其他场景在场景1的基础上增设视线诱导方案。具体而言:场景2增设低位方案(弹性交通柱+防撞桶);场景3增设高位方案(反光环+警示型线形诱导标);场景4增设组合式方案(低位+高位)。通过模拟驾驶平台获得行驶距离、方向盘角度、横向偏移等数据,并根据轨迹突变现象的发生、演变和消退,构建评价指标体系。研究结果表明:视觉参照系突变会导致行车轨迹突变,连续一致的视线诱导方案可以调节这一现象。具体而言,与对照组相比,低位方案的突出效果是使洞门前的方向盘转角(SWAav)减少了82%,有助于减缓驾驶人对洞门的规避动作;高位方案的突出效果是使渐变系数(G)提高了3.7倍,短暂稳定段的期望横向偏移(O1)减少了31%,以及O1与稳定段期望横向偏移(O2)的差值(O1-O2)减少了75%,从而提高了轨迹的渐变性,减弱了对隧道侧壁的规避,并提升了对隧道内环境的适应性;组合式方案结合了低位和高位方案的优点,使G提高了4.4倍,SWAav减少了83%,O1减少了41%,O1-O2减少了98%,在提高轨迹变化段的渐变性,减弱对洞门的规避动作、对隧道侧壁的规避效应以及提高对隧道内环境适应性方面均表现最佳。因此,建议在高速公路隧道入口区域增设组合式方案,特殊情况可仅增设高位方案。




2024, 42(3): 31-41.
doi: 10.3963/j.jssn.1674-4861.2024.03.004
摘要:
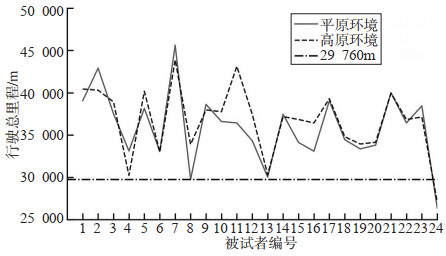
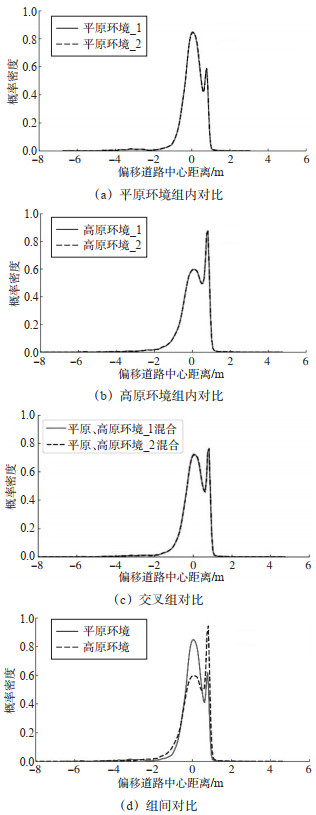
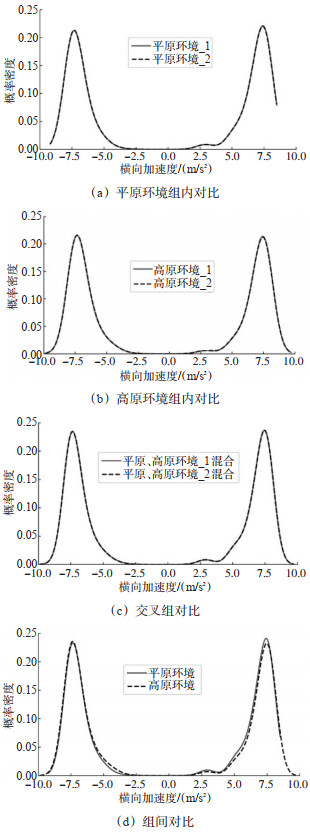
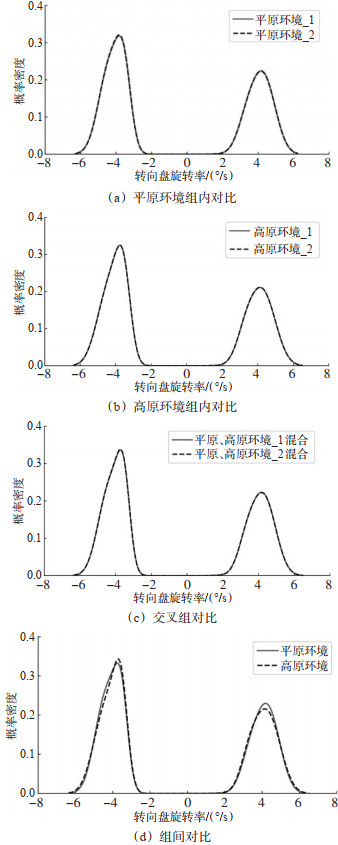
为了量化分析高原环境导致的驾驶行为特征差异,寻找驾驶绩效下降时间窗,运用驾驶模拟器和低氧发生器在平原地区模拟海拔3 900 m高原驾驶环境,开展驾驶模拟试验分别收集驾驶人在平原环境和模拟高原环境的驾驶行为数据和心电图(electrocardiogram,ECG)信号数据。通过对比高原实车试验环境驾驶人的心率指标变化,运用雷达图、数值排序图和单因素方差分析方法对平原、高原环境下的驾驶行为特征进行对比分析,引入Jensen-Shannon散度(JS散度)量化2种环境下横向偏移距离、横向加速度、转向盘旋转率和速度这4个指标的概率密度拟合分布之间的差异,使用差分法确定高原环境下的驾驶绩效下降时间,验证了模拟高海拔环境驾驶模拟试验的有效性研究。结果表明:高原环境下横向偏移距离标准差、横向加速度标准差、转向盘旋转率标准差、速度标准差比平原环境下分别增加了0.094 3 m,0.119 0 m/s2,0.000 9 °/s,0.651 3 km/h,车辆整体稳定性降低;借助JS散度发现横向偏移距离、横向加速度、转向盘旋转率和速度这4个指标在2种环境下的数值分布存在较大距离,分别为0.23,0.11,0.01,0.02,其中车辆的横向运动受负面影响更大;在进入海拔3 900 m的高原地区时,驾驶绩效约在6 min后显著下降。
为了量化分析高原环境导致的驾驶行为特征差异,寻找驾驶绩效下降时间窗,运用驾驶模拟器和低氧发生器在平原地区模拟海拔3 900 m高原驾驶环境,开展驾驶模拟试验分别收集驾驶人在平原环境和模拟高原环境的驾驶行为数据和心电图(electrocardiogram,ECG)信号数据。通过对比高原实车试验环境驾驶人的心率指标变化,运用雷达图、数值排序图和单因素方差分析方法对平原、高原环境下的驾驶行为特征进行对比分析,引入Jensen-Shannon散度(JS散度)量化2种环境下横向偏移距离、横向加速度、转向盘旋转率和速度这4个指标的概率密度拟合分布之间的差异,使用差分法确定高原环境下的驾驶绩效下降时间,验证了模拟高海拔环境驾驶模拟试验的有效性研究。结果表明:高原环境下横向偏移距离标准差、横向加速度标准差、转向盘旋转率标准差、速度标准差比平原环境下分别增加了0.094 3 m,0.119 0 m/s2,0.000 9 °/s,0.651 3 km/h,车辆整体稳定性降低;借助JS散度发现横向偏移距离、横向加速度、转向盘旋转率和速度这4个指标在2种环境下的数值分布存在较大距离,分别为0.23,0.11,0.01,0.02,其中车辆的横向运动受负面影响更大;在进入海拔3 900 m的高原地区时,驾驶绩效约在6 min后显著下降。





2024, 42(3): 42-52.
doi: 10.3963/j.jssn.1674-4861.2024.03.005
摘要:
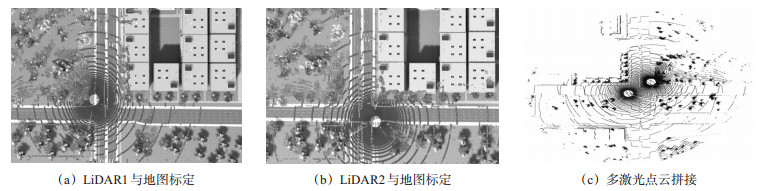
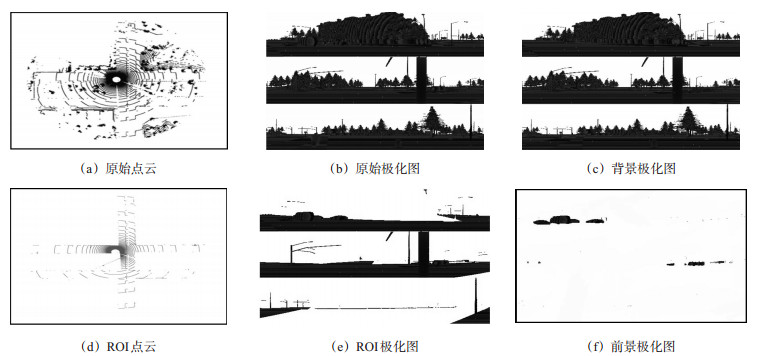
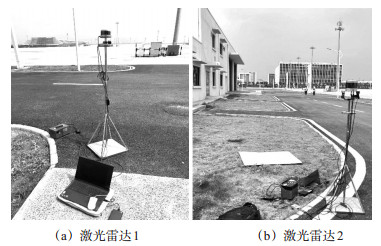
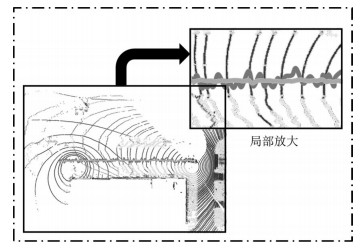
在车路协同路侧感知研究中,由于点云数据量庞大且存在着不可避免的目标遮挡情况,导致检测效率低、目标轨迹不稳定和跟踪精度低的问题。针对上述问题,提出了1种融合高精度地图的多激光雷达路侧智能感知方法,通过融合高精度地图信息,提高感知结果的准确性和可靠性。该方法分为3个部分:①通过多激光雷达的标定结果,利用高精度地图完成三维点云区域中感兴趣区域的提取,从而有效减少待处理点云的数量,提升计算效率;②基于极化图高斯混合背景模型的背景建模方法,利用极化图完成运动目标快速检测,避免大规模激光点云的直接处理,有效提升检测效率;③利用车辆航向与车道线方向一致性约束,将高精度地图中的车道方向转化为卡尔曼滤波框架下的车辆状态线性约束,改善车辆检测与轨迹跟踪的性能。实验中,分别在仿真交叉路口与实车实验道路双T形路口对算法与模型进行测试验证。相比于其他方法,所提出的方法数据量减少了55%,目标检测准确率提高了12%,耗时减少了56%,目标跟踪的误差极值、误差均值以及均方根误差均有所降低。实验结果表明:所提的方法能有效融合高精度地图信息,在大范围道路场景下实现对道路运动目标的快速检测与稳定跟踪。
在车路协同路侧感知研究中,由于点云数据量庞大且存在着不可避免的目标遮挡情况,导致检测效率低、目标轨迹不稳定和跟踪精度低的问题。针对上述问题,提出了1种融合高精度地图的多激光雷达路侧智能感知方法,通过融合高精度地图信息,提高感知结果的准确性和可靠性。该方法分为3个部分:①通过多激光雷达的标定结果,利用高精度地图完成三维点云区域中感兴趣区域的提取,从而有效减少待处理点云的数量,提升计算效率;②基于极化图高斯混合背景模型的背景建模方法,利用极化图完成运动目标快速检测,避免大规模激光点云的直接处理,有效提升检测效率;③利用车辆航向与车道线方向一致性约束,将高精度地图中的车道方向转化为卡尔曼滤波框架下的车辆状态线性约束,改善车辆检测与轨迹跟踪的性能。实验中,分别在仿真交叉路口与实车实验道路双T形路口对算法与模型进行测试验证。相比于其他方法,所提出的方法数据量减少了55%,目标检测准确率提高了12%,耗时减少了56%,目标跟踪的误差极值、误差均值以及均方根误差均有所降低。实验结果表明:所提的方法能有效融合高精度地图信息,在大范围道路场景下实现对道路运动目标的快速检测与稳定跟踪。










2024, 42(3): 53-61.
doi: 10.3963/j.jssn.1674-4861.2024.03.006
摘要:
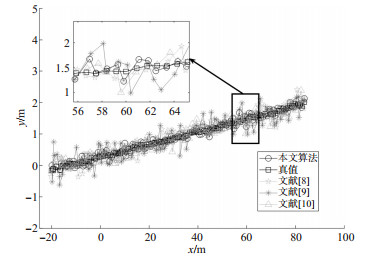
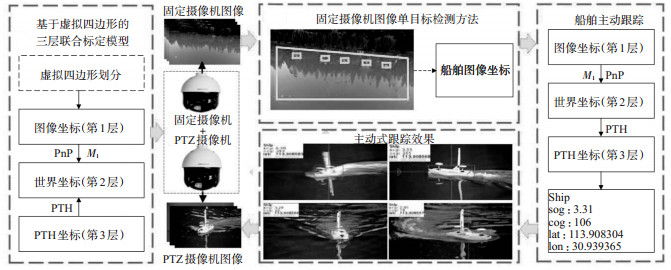
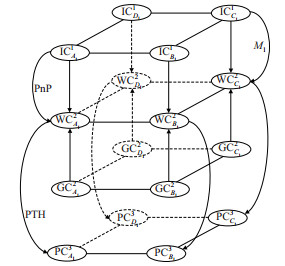
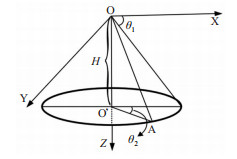
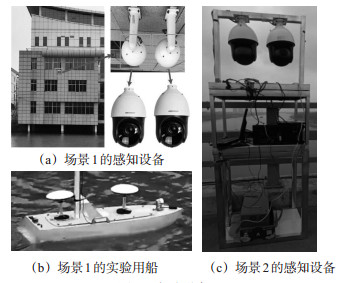
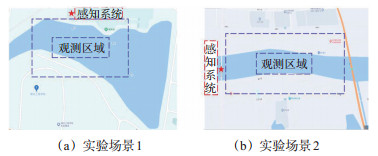
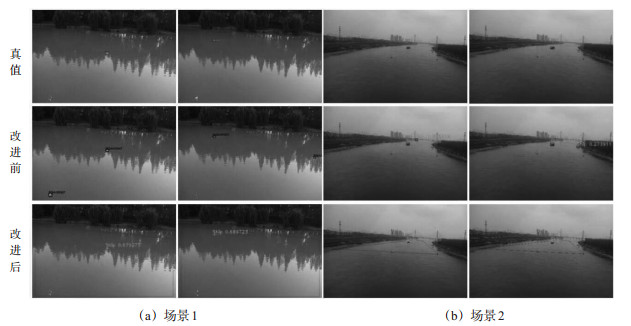
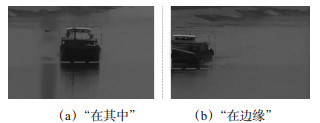
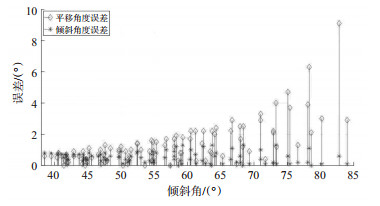
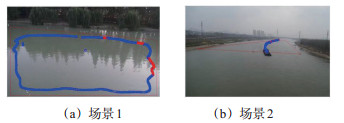
仅依靠当前的闭路电视(closed-circuit television,CCTV)系统,往往难以主动跟踪并拍摄内河船舶清晰的图像。针对上述问题,研究了基于固定/平移-倾斜-对焦(pan-tilt-zoom,PTZ)摄像机系统的开阔水域小目标船舶主动式跟踪方法。采用基于虚拟四边形的三层联合标定模型对固定摄像机和PTZ摄像机进行联合标定,将虚拟四边形内的图像坐标与PTZ摄像机的平移角和倾斜角一一对应;引入虚拟四边形的概念,有效过滤虚拟四边形外目标的干扰,提高小目标船舶的检测准确率;利用透视n点(perspective-n-point, PnP)问题算法和虚拟四边形顶点的图像坐标,得到图像坐标与世界坐标间的映射关系,再利用Pan-Tilt-Height(PTH)模型将虚拟四边形中目标的世界坐标转化为PTH坐标;在小目标跟踪过程中,通过连续检测虚拟四边形中船舶边框质心的图像坐标,即可计算得到PTZ摄像机的平移角与倾斜角,从而实现实时主动跟踪的目的,并尽最大限度的保持船舶目标处于PTZ摄像机图像的中心位置。选取湖北省孝感市春晖湖和武汉市汉江中法桥段这2处真实场景,进行可靠性和有效性验证,实验结果表明:①利用改进的目标检测方法对固定摄像机图像中的船舶进行检测,F1-Score分别为96.82%和97.62%;②利用研究的主动式跟踪方法跟踪运动船舶时,PTZ摄像机的跟踪失败率为4.63%。本文研究的主动式跟踪方法的跟踪速率可以达到18.55 fps。
仅依靠当前的闭路电视(closed-circuit television,CCTV)系统,往往难以主动跟踪并拍摄内河船舶清晰的图像。针对上述问题,研究了基于固定/平移-倾斜-对焦(pan-tilt-zoom,PTZ)摄像机系统的开阔水域小目标船舶主动式跟踪方法。采用基于虚拟四边形的三层联合标定模型对固定摄像机和PTZ摄像机进行联合标定,将虚拟四边形内的图像坐标与PTZ摄像机的平移角和倾斜角一一对应;引入虚拟四边形的概念,有效过滤虚拟四边形外目标的干扰,提高小目标船舶的检测准确率;利用透视n点(perspective-n-point, PnP)问题算法和虚拟四边形顶点的图像坐标,得到图像坐标与世界坐标间的映射关系,再利用Pan-Tilt-Height(PTH)模型将虚拟四边形中目标的世界坐标转化为PTH坐标;在小目标跟踪过程中,通过连续检测虚拟四边形中船舶边框质心的图像坐标,即可计算得到PTZ摄像机的平移角与倾斜角,从而实现实时主动跟踪的目的,并尽最大限度的保持船舶目标处于PTZ摄像机图像的中心位置。选取湖北省孝感市春晖湖和武汉市汉江中法桥段这2处真实场景,进行可靠性和有效性验证,实验结果表明:①利用改进的目标检测方法对固定摄像机图像中的船舶进行检测,F1-Score分别为96.82%和97.62%;②利用研究的主动式跟踪方法跟踪运动船舶时,PTZ摄像机的跟踪失败率为4.63%。本文研究的主动式跟踪方法的跟踪速率可以达到18.55 fps。




2024, 42(3): 62-73.
doi: 10.3963/j.jssn.1674-4861.2024.03.007
摘要:
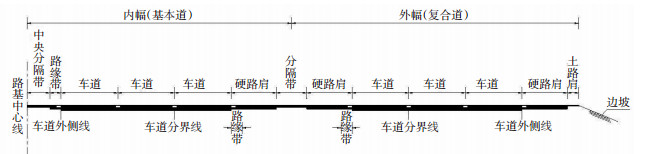
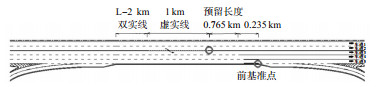
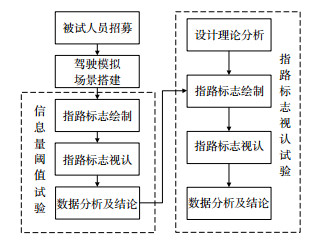
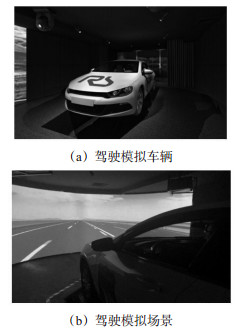
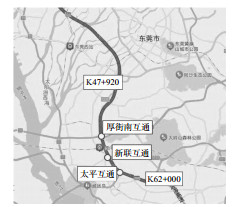
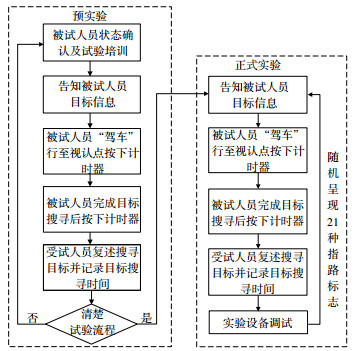
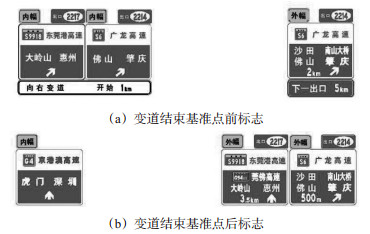
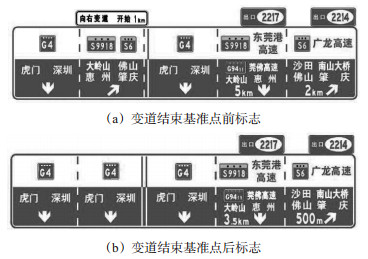
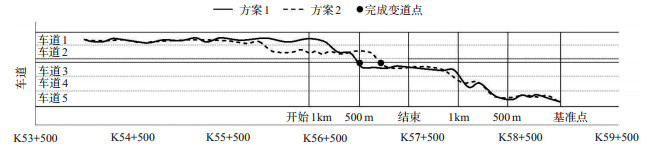
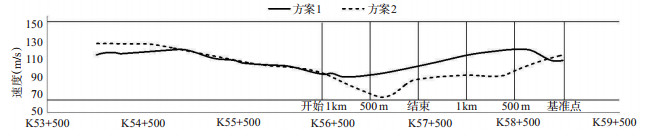
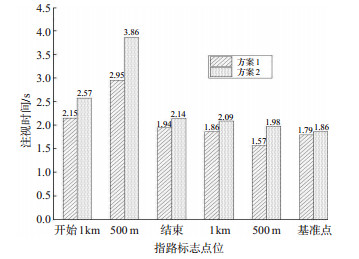
整体复合式高速公路具有特殊的道路结构和交通组织模式,所需传递的信息量较大。为提升指路标志引导效率,避免信息过载,改善整体复合式高速公路交通运行的安全性,针对该场景指路标志的布设展开研究。以广深高速公路为例,通过分析内外分幅交通组织模式下整体复合式高速公路特征,明确了指路标志的布设原则并据此提出了基于内外幅功能和基于车道功能的信息指引方法以及适用于复合式高速公路的指路信息分级方式。借助驾驶模拟技术,进行了指路标志的信息阈值和版面设计试验。先后测得不同信息数量指路标志驾驶人目标搜寻时间和被试人员驶出互通出口过程中横向偏移量、速度、加速度以及标志注视时间。信息阈值试验中,使用稳健估计理论处理目标信息搜寻时间,对比可供信息搜寻时间表,认为整体复合式高速公路指路标志信息阈值为8条。版面设计试验中,依据提出的2种信息指引方法和信息分级方式绘制的互通出口指路标志均能正确引导车辆到达目的地,但基于内外幅功能的指引方法信息传递效率更高,使得内外幅换道提前约250 m,驾驶速度提高5.88%,加速度标准差减小45.77%,并且缩短了驾驶人注视标志的时间。研究表明:在内外分幅的整体复合式高速公路中,使用基于内外幅功能的信息指引方法能提高指路标志视认性,有效引导交通运行,推荐整体复合式高速公路采用基于内外幅功能的信息指引方法布设指路标志。
整体复合式高速公路具有特殊的道路结构和交通组织模式,所需传递的信息量较大。为提升指路标志引导效率,避免信息过载,改善整体复合式高速公路交通运行的安全性,针对该场景指路标志的布设展开研究。以广深高速公路为例,通过分析内外分幅交通组织模式下整体复合式高速公路特征,明确了指路标志的布设原则并据此提出了基于内外幅功能和基于车道功能的信息指引方法以及适用于复合式高速公路的指路信息分级方式。借助驾驶模拟技术,进行了指路标志的信息阈值和版面设计试验。先后测得不同信息数量指路标志驾驶人目标搜寻时间和被试人员驶出互通出口过程中横向偏移量、速度、加速度以及标志注视时间。信息阈值试验中,使用稳健估计理论处理目标信息搜寻时间,对比可供信息搜寻时间表,认为整体复合式高速公路指路标志信息阈值为8条。版面设计试验中,依据提出的2种信息指引方法和信息分级方式绘制的互通出口指路标志均能正确引导车辆到达目的地,但基于内外幅功能的指引方法信息传递效率更高,使得内外幅换道提前约250 m,驾驶速度提高5.88%,加速度标准差减小45.77%,并且缩短了驾驶人注视标志的时间。研究表明:在内外分幅的整体复合式高速公路中,使用基于内外幅功能的信息指引方法能提高指路标志视认性,有效引导交通运行,推荐整体复合式高速公路采用基于内外幅功能的信息指引方法布设指路标志。






交通信息与安全
Journal of Transport Information and Safety
(1983年创刊 双月刊 )
曾用刊名:《交通与计算机》
主管单位:中华人民共和国教育部
主办单位:武汉理工大学
协办单位:
中国人工智能学会智能交通专业委员会
主 编:钟鸣
副 主 编:马勇 胡钊政 杜志刚
领域主编:陈再刚 杜文博 吕能超
黄亚敏 郑士源
执行主编:徐堃
编辑出版:
《交通信息与安全》编辑部
地 址:
湖北省武汉市武昌区和平大道武汉理工大学余家头校区125信箱
邮 编:430063
电话/传真:027-86580355
E-mail:jtjsj@vip.163.com
官方网站:http://www.jtxa.net/
邮发代号:38-94
国内刊号:CN 42-1781/U
国际刊号:ISSN 1674-4861
期刊收录
- 《中文核心期刊要目总览》入编期刊
- 中国科学引文数据库(CSCD)来源期刊
- 中国科技核心期刊
- RCCSE中国核心学术期刊(A)
- 中国学术期刊综合评价数据库(CAJ-CED)收录
- 中国科技论文与引文数据库(CSTPCD)收录
- 中国核心期刊(遴选)数据库收录
- 中文科技期刊数据库收录
- 中国期刊网(CNKI)收录
- 《中国学术期刊(光盘版)收录》
- 中国终身教育学术研究数据库总库收录
- 日本科学技术振兴机构数据库(JST)收录
- 《世界期刊影响力指数(WJCI)报告》(2020科技版)