

A Method for Predicting the Collision Probability between Crossing-street Pedestrians and Vehicles Considering the Uncertainty of Pedestrians' Movement Trajectories
-
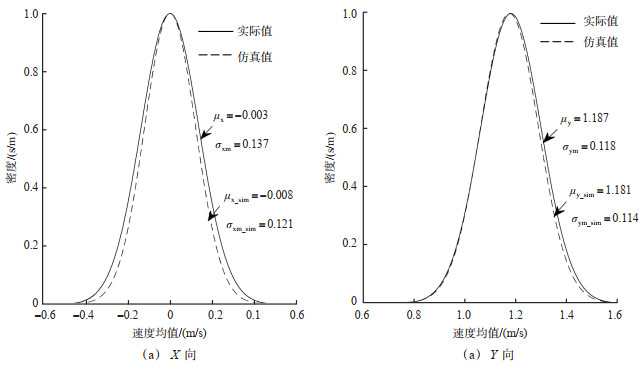
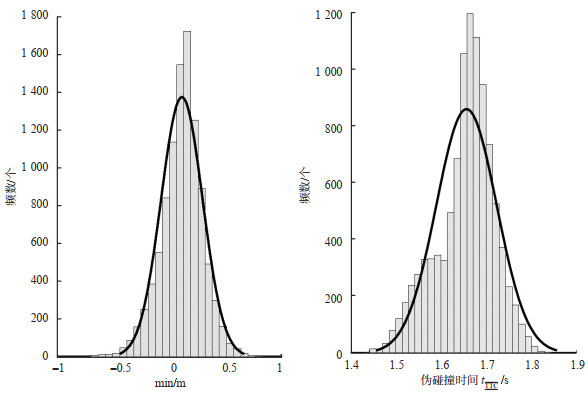
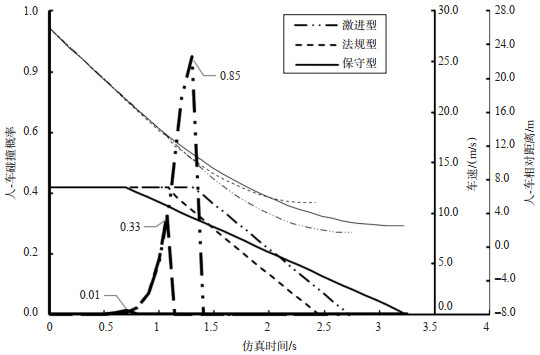
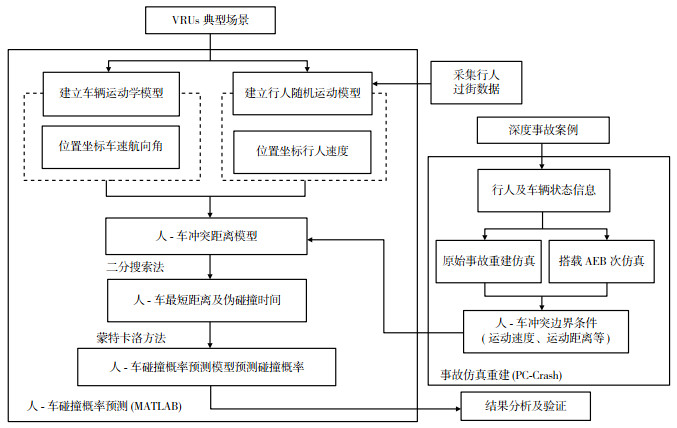
摘要: 为了准确预测人-车冲突中的碰撞风险,研究了利用碰撞概率评估人-车碰撞风险的预测方法。基于车辆运动特征建立车辆运动学模型,通过采集行人实际过街运动轨迹并提取不确定性特征,采用一阶马尔科夫模型和高斯白噪声建立行人随机运动模型,在此基础上构建人-车冲突距离模型;运用蒙特卡洛抽样,提取行人过街过程中的人-车最短距离和碰撞时间(time to collision,TTC)分布特征,通过拟合这些特征来估算最短距离和TTC的概率密度函数,建立人-车碰撞概率预测模型;结合2起人-车深度事故案例和3种不同制动特性的自动紧急制动(automatic emergency braking,AEB)系统,对比验证人-车碰撞概率预测模型的有效性。结果显示:建立的行人随机运动模型,其模拟的行人运动速度的均值和标准差与实际值的绝对误差在2%以内,模型精度较高;在事故案例仿真中,车辆与行人在发生碰撞时刻对应的碰撞概率为100%;在车辆加装AEB的仿真中,激进型AEB,法规型AEB以及保守型AEB在触发时刻对应的碰撞概率分别为超过了80%,在30%~40%之间,以及不足5%,这表明人-车碰撞概率预测模型可有效预测2起真实案例中行人和车辆在不同时刻的碰撞风险,且与使用固定触发阈值的AEB相比,建立的人-车碰撞概率预测模型能够更加准确直观地反应人-车碰撞风险。Abstract: In order to accurately predict collision risk in pedestrian-vehicle conflicts, a prediction method of collision probability is proposed to assess collision risk between pedestrians and vehicles. A kinematic vehicle model is established based on vehicle motion characteristics, and a stochastic kinematics model is established for pedestrians based on a first-order Markov model with Gaussian white noise by collecting pedestrians' movement trajectories of street crossings and extracting uncertainty features. Moreover, a collision distance model for pedestrian-vehicle conflicts is developed on the proposed kinetics models. The distribution of the minimum distances and time to collision (TTC) between vehicles and pedestrians during pedestrian street crossings are extracted by using a Monte Carlo sampling method. Then, a prediction model of pedestrian-vehicle collision probability is developed by feature fitting methods to estimate the probability density functions of the minimum distances and TTC. Finally, the prediction model of pedestrian-vehicle collision probability is verified based on two pedestrian-vehicle accidents and three automatic emergency braking (AEB) systems with different braking characteristics. The results show that the error of the mean and standard deviation of pedestrians' motion velocities simulated from the proposed stochastic kinematics model for pedestrians is smaller than 2%. In the simulated accident cases, the probability of the occurrence of pedestrian-vehicle collision is 100%, while for the simulated vehicles with AEB, the aggressive AEB, regulatory AEB and conservative AEB have a collision probability of more than 80%, between 30% and 40% and less than 5%, respectively. It shows that the prediction model of pedestrian-vehicle collision probability can effectively predict the collision risk between pedestrians and vehicles at different moments in the two real cases, and has a better performance than the AEB with a fixed threshold.
-
Key words:
- traffic safety /
- pedestrian-vehicle collision /
- collision probability /
- Monte Carlo /
- uncertainty /
- in-depth accident
-

图 6 初始仿真状态$d_{\min }$和$t_{\overline{\underline{\mathrm{TTC}}}}$分布(案例1)
Figure 6. Distribution of $d_{\min }$ and $t_{\overline{\underline{\mathrm{TTC}}}}$ at the initial simulation moment (Case 1)

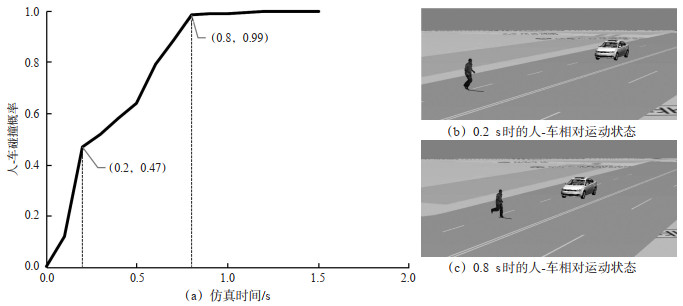
图 9 人-车碰撞概率曲线(案例1)
Figure 9. Curve of pedestrian-vehicle collision probability(Case 1)

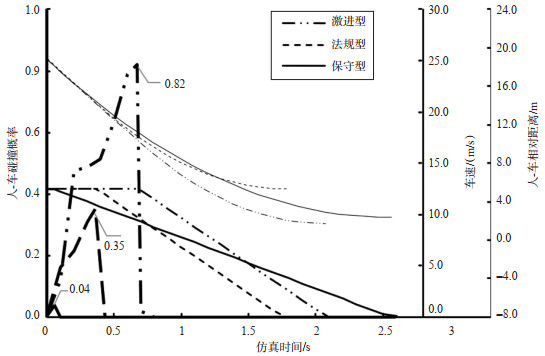
图 10 碰撞概率与人-车相对距离及车速关系曲线(案例1)
Figure 10. Curve of relationship between collision probability and relative pedestrian-vehicle distance and vehicle velocity(Case 1)

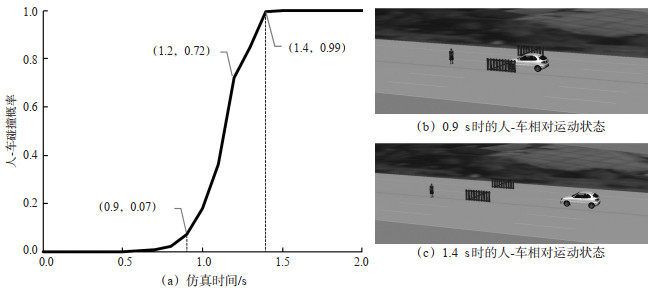
图 12 人-车碰撞概率曲线(案例2)
Figure 12. Curve of pedestrian-vehicle collision probability(Case 2)

图 13 碰撞概率与人-车相对距离及车速关系曲线(案例2)
Figure 13. Curve of relationship between collision probability and relative pedestrian-vehicle distance and vehicle velocity(Case 2)
-
[1] World Health Organization. Global status report on road safety[R]. Geneva: World Health Organization, 2018. [2] 李彩霞, 卢少波, 张博涵, 等. 基于行人位置预测的人车转向避撞路径规划[J]. 汽车工程, 2021, 43(6): 877-884. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202106011.htmLI C X, LU S B, ZHANG B H, et al. Human-vehicle steering collision avoidance path planning based on pedestrian location prediction[J]. Automotive Engineering, 2021, 43(6): 877-884. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202106011.htm [3] 杨旭, 周竹萍, 刘博闻. 基于突变理论的人车碰撞风险实时预警模型[J]. 南京理工大学学报(自然科学版), 2021, 45 (5): 606-613.YANG X, ZHOU Z P, LIU B W. Real-time early warning model of collision risk between human and vehicle based on catastrophe theory[J]. Journal of Nanjing University of Science and Technology (Natural Science), 2021, 45(5): 606-613. (in Chinese) [4] 褚昭明, 陈瑞祥, 刘金广. 城市道路无信号控制路段行人过街风险分级预警模型[J]. 交通信息与安全, 2023, 41(1): 53-61. doi: 10.3963/j.jssn.1674-4861.2023.01.006CHU Z M, CHEN R X, LIU J G. A model of risk classification and forewarning for pedestrian crossing behavior at unsignalized urban roadways[J]. Journal of Transport Information and Safety, 2023, 41(1): 53-61. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2023.01.006 [5] 杨琦, 卢杨, 汪利利, 等. 信号交叉口行人过街形式适用性分析[J]. 中国公路学报, 2014, 27(10): 93-100. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201410014.htmYANG Q, LU Y, WANG L L, et al. Analysis of applicability of pedestrian crossing form in signalized intersection[J]. China Journal of Highway and Transport, 2014, 27(10): 93-100. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201410014.htm [6] 黄慧玲. 基于前方车辆行为分析的安全预警方法研究[D]. 上海: 上海交通大学, 2016.HUANG H L. Research on security early warning method based on behavior analysis of the front vehicles[D]. Shanghai: Shanghai Jiao Tong University, 2016. (in Chinese) [7] 袁佳威. 城市工况下避撞行人的主动制动策略研究[D]. 长春: 吉林大学, 2020.YUAN J W. Research on active braking strategy of pedestrians collision avoidance in urban conditions[D]. Changchun: Jilin University, 2020. (in Chinese) [8] 杨为, 赵胡屹, 舒红. 自动紧急制动系统行人避撞策略及仿真验证[J]. 重庆大学学报, 2019, 42(2): 1-10. https://www.cnki.com.cn/Article/CJFDTOTAL-FIVE201902001.htmYANG W, ZHAO H Y, SHU H. Simulation and verification of the control strategies for AEB pedestrian collision avoidance system[J]. Journal of Chongqing University, 2019, 42(2): 1-10. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-FIVE201902001.htm [9] KIM J, JO K, LIM W, et al. Curvilinear-coordinate-based object and situation assessment for highly automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(3): 1559-1575. [10] LAUGIER C, PAROMTCHIK I E, PERROLLAZ M, et al. Probabilistic analysis of dynamic scenes and collision risks assessment to improve driving safety[J]. IEEE Intelligent Transportation Systems Magazine, 2011, 3(4): 4-19. [11] AOUDE G S, LUDERS B D, LEE K K H, et al. Threat assessment design for driver assistance system at intersections[C]. 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal: IEEE, 2010. [12] HAN Y, LI Q, QIAN Y, et al. Comparison of the landing kinematics of pedestrians and cyclists during ground impact determined from vehicle collision video records[J]. International Journal of Vehicle Safety, 2018, 10(3-4): 212-234. [13] 韩勇, 林丽雅, 何勇, 等. 电动两轮车骑车人紧急避让姿态对损伤风险的影响研究[J]. 汽车工程, 2022, 44(5): 764-770. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202205017.htmHAN Y, LIN L Y, HE Y, et al. Research on the effects of emergent avoidance postures of electric two-wheeler riders on their injury risk[J]. Automotive Engineering, 2022, 44 (5): 764-770. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202205017.htm [14] 韩勇, 李永强, 许永虹, 等. 基于VRUs深度事故重建的AEB效能对头部损伤风险的影响[J]. 汽车安全与节能学报, 2021, 12(4): 490-498. https://www.cnki.com.cn/Article/CJFDTOTAL-QCAN202104007.htmHAN Y, LI Y Q, XU Y H, et al. Effectiveness of AEB system for head injury risk based on VRUs in-depth accident reconstruction[J]. Journal of Automotive Safety and Energy, 2021, 12(4): 490. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCAN202104007.htm [15] WU H, HAN Y, WANG B Y, et al. The difference in the kinematic and injury risk of cyclists between normal and emergency avoidance postures in vehicle collisions[J]. International Journal of Crashworthiness, 2022, 28(1): 82-95. [16] 刘象祎. 行人机动不确定下的人车碰撞概率预测[D]. 长沙: 湖南大学, 2017.LIU X Y. Probabilistic risk assessment for pedestrian-vehicle collision considering uncertainties of pedestrian mobility[D]. Changsha: Hunan University, 2017. (in Chinese) [17] FENG J, WANG C, XU C, et al. Active collision avoidance strategy considering motion uncertainty of the pedestrian[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 23(4): 3543-3555. [18] 韩学源, 金先龙, 张晓云, 等. 基于视频图像与直接线性变换理论的车辆运动信息重构[J]. 汽车工程, 2012, 34(12): 1145-1149. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201212019.htmHAN X Y, JIN X L, ZHANG X Y, et al. Vehicle movement information reconstruction based on video images and dlt theory[J]. Automotive Engineering, 2012, 34 (12) : 1145-1149. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201212019.htm [19] BERTHELOT A, TAMKE A, DANG T, et al. A novel approach for the probabilistic computation of time-to-collision[C]. 2012 IEEE Intelligent Vehicles Symposium, Madrid, Spain: IEEE, 2012. [20] BERTHELOT A, TAMKE A, DANG T, et al. Handling uncertainties in criticality assessment[C]. 2011 IEEE Intelligent Vehicles Symposium(IV), Baden-Baden, Germany: IEEE, 2011 [21] HUANG Z, LIU X, SONG X, et al. Probabilistic risk assessment for pedestrian-vehicle collision considering uncertainties of pedestrian mobility[J]. Traffic Injury Prevention, 2017, 18(6): 650-656. [22] 韩勇, 徐甲芍, 石亮亮, 等. 电动二轮车驾驶人头部损伤再现不确定性方法[J]. 中国公路学报, 2020, 33(1): 172. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL202001018.htmHAN Y, XU J S, SHI L L, et al. Uncertainty analysis of head injury via reconstruction of electric two-wheeler accidents[J]. China Journal of Highway and Transport, 2020, 33 (1): 172. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL202001018.htm [23] JEPPSSON H, LUBBE N. Simulating automated emergency braking with and without torricelli vacuum emergency braking for cyclists: effect of brake deceleration and sensor field-of-view on accidents, injuries and fatalities[J]. Accident Analysis & Prevention, 2020(142): 105538. [24] PAN D, HAN Y, JIN Q, et al. Probabilistic prediction of collisions between cyclists and vehicles based on uncertainty of cyclists' movements[J]. Transportation Research Record, 2022, 2677(3): 1151-1164. [25] TANAKA S, TERAOKA E Y M. Benefit estimation of active safety systems for crossing-pedestrian scenarios[C]. FISITA World Automotive Congress, Maastricht, The Netherlands: FISITA, 2014. [26] HAUS S H, SHERONY R, GABLER H C. Estimated benefit of automated emergency braking systems for vehicle-pedestrian crashes in the United States[J]. Traffic Injury Prevention, 2019, 20(s1): S171-S176. [27] HAMDANE H, SERRE T, MASSON C, et al. Issues and challenges for pedestrian active safety systems based on real world accidents[J]. Accident Analysis & Prevention, 2015(82): 53-60. [28] 苏占领, 牛成勇, 徐建勋, 等. 基于行人横穿场景的AEB系统性能测试与评价研究[J]. 辽宁工业大学学报(自然科学版), 2022, 42(4): 218-222. https://www.cnki.com.cn/Article/CJFDTOTAL-LNGX202204002.htmSU Z L, NIU C Y, XU J X, et al. Research on performance test and evaluation of AEB system based on pedestrian crossing scene[J]. Journal of Liaoning University of Technology (Natural Science), 2022, 42(4): 218-222. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-LNGX202204002.htm [29] 曹毅, 周华, 肖凌云, 等. 基于NAIS数据库中视频信息的人—车碰撞事故特征分析[J]. 汽车安全与节能学报, 2020, 11(1): 44-52. https://www.cnki.com.cn/Article/CJFDTOTAL-QCAN202001004.htmCAO Y, ZHOU H, XIAO L Y, et al. Analysis of pedestrian-vehicle collision accident characteristics based on the video information from NAIS database[J]. Journal of Automotive Safety and Energy, 2020, 11(1): 44-52. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCAN202001004.htm -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 595
- HTML全文浏览量: 384
- PDF下载量: 55
- 被引次数: 0